gan fet到人形机器人的应用
发布时间:2025-05-02 09:30
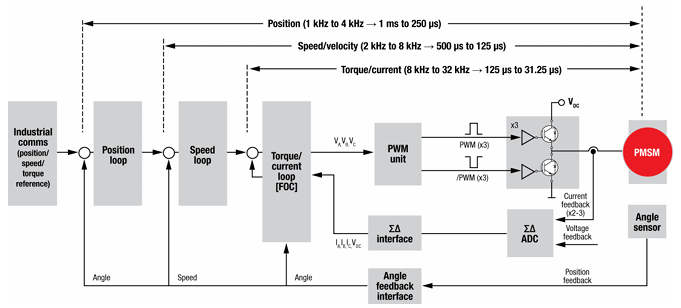 本文指出:简介人类机器人包括许多子系统,包括控制系统,电池管理系统(BMS),传感器系统,AI系统控制等。人形机器人机器人内空间极限最大的子系统是伺服控制系统。为了实现类似于人类的运动范围,通常在整个机器人中部署了大约40个伺服电动机(PMSM)和控制系统。电动机分布在机器人身体的不同部位,例如颈部,躯干,手臂,腿,脚趾等。此数字不包括手的电动机。为了模拟人的手的自由操作,一只手可以包含十几个微型电动机。这些摩托车的电源要求取决于执行的特定操作;例如,Drivi的电动机NG机器人的手指可能只需要几个放大器电流,而臀部或腿上的电动机可能需要100安培或更多。与传统的伺服系统相比,人形机器人的伺服系统对控制,大小和散热要求具有更高的控制。本文介绍了GAN(氮化炮)对运动驱动器的各种好处,并展示了GAN如何帮助解决人形机器人中伺服系统面临的挑战。图1控制电动机控制回路的通用技术更准确地控制伺服MOT应用程序器驱动器,电动机控制通常分为几个控制回路层:电流/扭矩,环路速度,循环位置和更高的控制循环。这些循环通常以级联形式排列,每个循环都有“实时”处理要求。电流/扭矩循环是最快的控制循环。每个上游循环都在多个以前的循环中运行,并提供了下游环路输入的引用。图1显示了一个典型Cal级联控制拓扑。控制循环的最重要部分是当前循环。通常,在当前循环中,FET传递频率相同,约为8kHz至32kHz。当前循环的速度直接影响电动机控制响应的准确性和速度。人形机器人的简单作用涉及控制许多伺服摩托车。为了协调机器人体内近40辆摩托车,同时保持系统的稳定性,每个关节的响应速度和速度必须满足非常高的要求。可以通过增加电机控制环的PWM的速度和频率来满足这些要求。例如,100kHz的偏移频率(图2)可以达到更高的电动机分辨率电流,从而导致电动电流波纹较小和更准确的控制。电流波的高分辨率还意味着可以获得更好的正弦电流,这可以提高运动效率并降低运动加热。在ddition,增加的PWM传输频率可以降低直流总线电容器的大小和电容。对于用陶瓷电容器代替的电解电容器,需要解决的总线容量要求减少。伺服功率级FET通过PWM信号定期从总线电容器中吸收电流。当PWM频率增加时,每单位时间消耗的每个费用都会减少,这意味着降低所需的总线容量。根据TIDA-010936测试,在将PWM频率从20kHz增加到80kHz之后,可以用具有相等容量的陶瓷电容器代替电解电容器,以获得相似的总线电压涟漪。与电解电容器相比,陶瓷电容器具有明显的好处:尺寸较小,使用寿命更长,高频性能等。因此,在设计人形机器人时,应考虑较高的电流环和较高的PWM频率。对于MOSFET型伺服驱动器,增加了PWm传输频率可能会造成额外的额外损失,从而导致驱动器的极端热量。当传输频率从10kHz增加到20kHz时,MOSFET型驱动因素将一般损失增加20%至30%,这对于人形机器人来说是不可接受的。另外,GAN FET在高频移动方面的损失较低。在TIDA-010936测试中,板的损失约为40kHz和80kHz,因此GAN特别适合传输频率方案。图2 100KHz和10kHz PWM电动机电流还原gan损耗的转移可以由于GAN设备的性质而实现如此低的损失。 GAN设备的GATE(CG)和较小的输出电容(COSS)具有较小的G电容,这使MOSFET的移动速度达到了100倍。由于关闭时间和时间较短,可以在较短的范围(例如10-20NS)中控制死者的时间,而MOSFET通常需要几乎1US的死时间。死时间的短时可以减少M中的损失卵子。此外,GAN FET没有车身二极管,但是通过第三个象限操作实现了自由转轮函数。在具有高PWM频率的情况下,MOSFET主体的二极管将导致恢复恢复的重大损失(QRR损失)。象限的第三次操作还将防止人体二极管引起的移动节点振铃和EMI的风险,从而减少对高功率密度类人体机器人中其他设备的破坏。图3 TIDA-010936电路板在48V输入电压下的损失与三相输出电流之间的损失较小。人形机器人的关节空间有限。电源板通常是直径为5-10厘米的PCB环。此外,关节应包括摩托车,还原器,编码器甚至传感器。对于设计师而言,在有限的空间中实现增加强度和更稳定的电动机控制非常重要。与MOSFET相比,GAN具有较小的RSP(特定的抗性CE,与模具区域的大小进行比较),这意味着与具有相同RDSON的MOSFET相比,GAN的死亡面积较小。德州仪器(TI)通过合并栅栏和驱动器进一步减少了足迹。它允许4.4mΩ半色 +门驱动器,包装仅为4.5 x 5.5mm。 Larawan 4 LMG2100框图以LMG2100R026为例。该设备结合了半色的FET和半试验,以承受连续的55A电流。 Incorporating drivers with fets has many advantages, including: ● decreased gate ringing, making more reliable operations ● Decreased power loop inductance and optimized package size ● reduced size with integrated gate drivers ● Protected devices with integrated protection functionality to compare gan and mosfet in designs, Power-010936 and TIDA-01629 offer similar levels of power.如图5所示,由于栅极驱动器的整合,整个电源设备的芯片面积已减少了50%以上和gan rsp的减少。图5 GAN和MOSFET比较水平的摘要以及人形机器人的摘要,对控制准确性和功率密度的要求很高。 GAN可以在高损失较低的高PWM频率下更轻松,更高的电机控制精度。 GAN的高密度特性与Texas Instruments(TI)的组合驱动器相结合可以减小尺寸。由于这些优势,电机类型驱动程序可以成为人形机器人的首选设计,从而实现更好,更强,更智能的机器人设计。除类型机器人外,GAN技术也是其他类型的机器人(合作机器人,外科机器人,AGV),工业系统,家用电器和其他需要高电量密度的应用的理想选择。
本文指出:简介人类机器人包括许多子系统,包括控制系统,电池管理系统(BMS),传感器系统,AI系统控制等。人形机器人机器人内空间极限最大的子系统是伺服控制系统。为了实现类似于人类的运动范围,通常在整个机器人中部署了大约40个伺服电动机(PMSM)和控制系统。电动机分布在机器人身体的不同部位,例如颈部,躯干,手臂,腿,脚趾等。此数字不包括手的电动机。为了模拟人的手的自由操作,一只手可以包含十几个微型电动机。这些摩托车的电源要求取决于执行的特定操作;例如,Drivi的电动机NG机器人的手指可能只需要几个放大器电流,而臀部或腿上的电动机可能需要100安培或更多。与传统的伺服系统相比,人形机器人的伺服系统对控制,大小和散热要求具有更高的控制。本文介绍了GAN(氮化炮)对运动驱动器的各种好处,并展示了GAN如何帮助解决人形机器人中伺服系统面临的挑战。图1控制电动机控制回路的通用技术更准确地控制伺服MOT应用程序器驱动器,电动机控制通常分为几个控制回路层:电流/扭矩,环路速度,循环位置和更高的控制循环。这些循环通常以级联形式排列,每个循环都有“实时”处理要求。电流/扭矩循环是最快的控制循环。每个上游循环都在多个以前的循环中运行,并提供了下游环路输入的引用。图1显示了一个典型Cal级联控制拓扑。控制循环的最重要部分是当前循环。通常,在当前循环中,FET传递频率相同,约为8kHz至32kHz。当前循环的速度直接影响电动机控制响应的准确性和速度。人形机器人的简单作用涉及控制许多伺服摩托车。为了协调机器人体内近40辆摩托车,同时保持系统的稳定性,每个关节的响应速度和速度必须满足非常高的要求。可以通过增加电机控制环的PWM的速度和频率来满足这些要求。例如,100kHz的偏移频率(图2)可以达到更高的电动机分辨率电流,从而导致电动电流波纹较小和更准确的控制。电流波的高分辨率还意味着可以获得更好的正弦电流,这可以提高运动效率并降低运动加热。在ddition,增加的PWM传输频率可以降低直流总线电容器的大小和电容。对于用陶瓷电容器代替的电解电容器,需要解决的总线容量要求减少。伺服功率级FET通过PWM信号定期从总线电容器中吸收电流。当PWM频率增加时,每单位时间消耗的每个费用都会减少,这意味着降低所需的总线容量。根据TIDA-010936测试,在将PWM频率从20kHz增加到80kHz之后,可以用具有相等容量的陶瓷电容器代替电解电容器,以获得相似的总线电压涟漪。与电解电容器相比,陶瓷电容器具有明显的好处:尺寸较小,使用寿命更长,高频性能等。因此,在设计人形机器人时,应考虑较高的电流环和较高的PWM频率。对于MOSFET型伺服驱动器,增加了PWm传输频率可能会造成额外的额外损失,从而导致驱动器的极端热量。当传输频率从10kHz增加到20kHz时,MOSFET型驱动因素将一般损失增加20%至30%,这对于人形机器人来说是不可接受的。另外,GAN FET在高频移动方面的损失较低。在TIDA-010936测试中,板的损失约为40kHz和80kHz,因此GAN特别适合传输频率方案。图2 100KHz和10kHz PWM电动机电流还原gan损耗的转移可以由于GAN设备的性质而实现如此低的损失。 GAN设备的GATE(CG)和较小的输出电容(COSS)具有较小的G电容,这使MOSFET的移动速度达到了100倍。由于关闭时间和时间较短,可以在较短的范围(例如10-20NS)中控制死者的时间,而MOSFET通常需要几乎1US的死时间。死时间的短时可以减少M中的损失卵子。此外,GAN FET没有车身二极管,但是通过第三个象限操作实现了自由转轮函数。在具有高PWM频率的情况下,MOSFET主体的二极管将导致恢复恢复的重大损失(QRR损失)。象限的第三次操作还将防止人体二极管引起的移动节点振铃和EMI的风险,从而减少对高功率密度类人体机器人中其他设备的破坏。图3 TIDA-010936电路板在48V输入电压下的损失与三相输出电流之间的损失较小。人形机器人的关节空间有限。电源板通常是直径为5-10厘米的PCB环。此外,关节应包括摩托车,还原器,编码器甚至传感器。对于设计师而言,在有限的空间中实现增加强度和更稳定的电动机控制非常重要。与MOSFET相比,GAN具有较小的RSP(特定的抗性CE,与模具区域的大小进行比较),这意味着与具有相同RDSON的MOSFET相比,GAN的死亡面积较小。德州仪器(TI)通过合并栅栏和驱动器进一步减少了足迹。它允许4.4mΩ半色 +门驱动器,包装仅为4.5 x 5.5mm。 Larawan 4 LMG2100框图以LMG2100R026为例。该设备结合了半色的FET和半试验,以承受连续的55A电流。 Incorporating drivers with fets has many advantages, including: ● decreased gate ringing, making more reliable operations ● Decreased power loop inductance and optimized package size ● reduced size with integrated gate drivers ● Protected devices with integrated protection functionality to compare gan and mosfet in designs, Power-010936 and TIDA-01629 offer similar levels of power.如图5所示,由于栅极驱动器的整合,整个电源设备的芯片面积已减少了50%以上和gan rsp的减少。图5 GAN和MOSFET比较水平的摘要以及人形机器人的摘要,对控制准确性和功率密度的要求很高。 GAN可以在高损失较低的高PWM频率下更轻松,更高的电机控制精度。 GAN的高密度特性与Texas Instruments(TI)的组合驱动器相结合可以减小尺寸。由于这些优势,电机类型驱动程序可以成为人形机器人的首选设计,从而实现更好,更强,更智能的机器人设计。除类型机器人外,GAN技术也是其他类型的机器人(合作机器人,外科机器人,AGV),工业系统,家用电器和其他需要高电量密度的应用的理想选择。 下一篇:没有了
 扫一扫,官方微信
|